Modelo 3D vs Fotogrametria por Imagens e Vídeo¶
3D Model vs Photogrammetry by Image and Video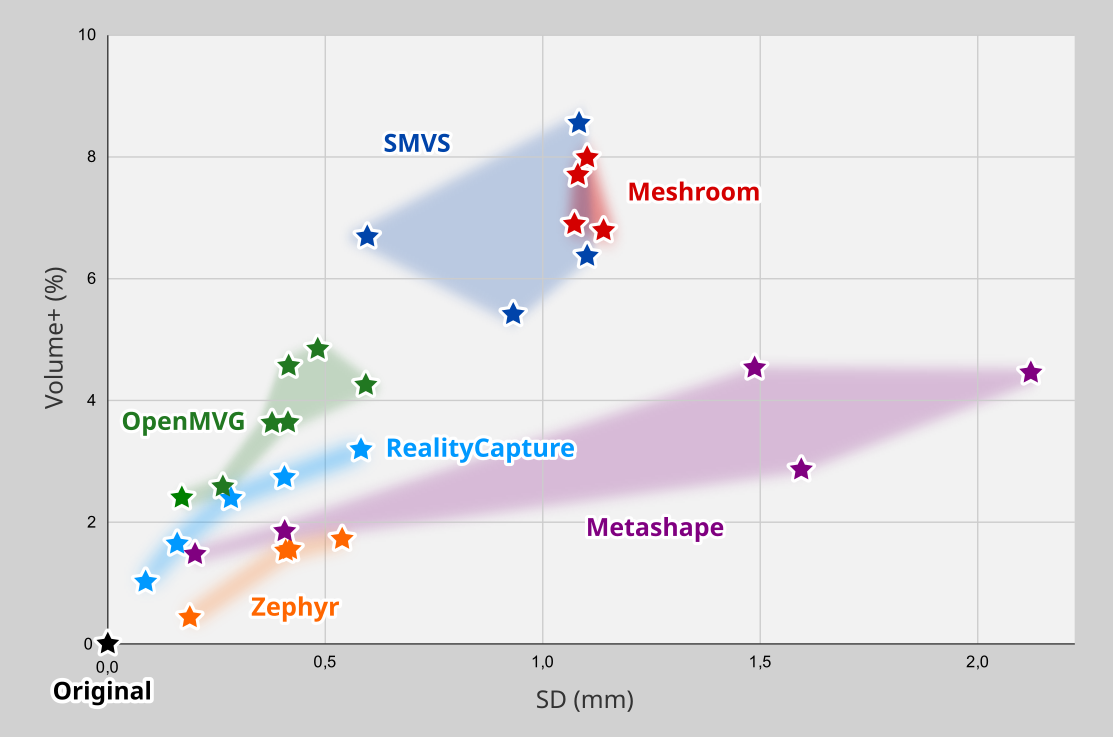
Cicero Moraes
Resumo¶
O presente artigo apresenta a comparação de 29 modelos digitalizados em 6 programas de fotogrametria diferentes, de modo a analisar a precisão da digitalização versus o modelo original.
Abstract¶
This article presents a comparison of 29 models scanned in 6 different photogrammetry programs, in order to analyze the accuracy of the scan versus the original model.
A full translated online version of this article can be accessed at this link: https://bit.ly/3DA24ZG
Atenção
Este material utiliza a seguinte licença Creative Commons: Atribuição 4.0 Internacional (CC BY 4.0).
Introdução¶
É praxe nos estudos de comparação entre sistemas de digitalização, se tomar a referência do padrão ouro, como por exemplo, um modelo advindo de escaneamento por luz estruturada ou tomografia computadorizada e então comparar tal modelo com as digitalizações pretendidas. O problema nesse caso é que o modelo padrão ouro já não representa completamente o real, pois podem haver algumas distorções por conta da resolução das ferramentas de digitalização. Para resolver esse problema, o presente trabalho utilizou uma abordagem diferente, tomando como base um modelo 3D disponível para visualização interativa, capturando telas de pontos de vistas diferentes desse modelo, gerando uma malha 3D por fotogrametria e finalmente comparando tal malha com o arquivo 3D baixado em formato .OBJ, ou seja, o mesmo que é visualizado interativamente. Tal situação permite a comparação com um modelo preciso, diferente de uma digitalização que é algo indireto. Deste modo é possível mensurar qual é o grau de precisão da fotogrametria do modo mais direto possível.
Materiais e Métodos¶
O Museu de História de Estocolmo (Historiska), possui uma conta no site do Sketchfab, um portal de visualização interativa de modelos 3D, onde disponibiliza uma série de peças do seu acervo, não apenas para a visualização, mas também permite que o modelo em 3D seja baixado em alguns formatos de arquivos, dentre eles o .OBJ (Wavefront), amplamente compatível com o Blender 3D. Entre os ítens da coleção, um dos que mais chamam a atenção é o crânio de uma vítima de guerra travada na segunda metade do século XIV e encontrado na Ilha de Gotland, Suécia. Uma grande lesão perimortem na região da maxila e mandíbula salta aos olhos dos observadores causando estupefação e curiosidade.
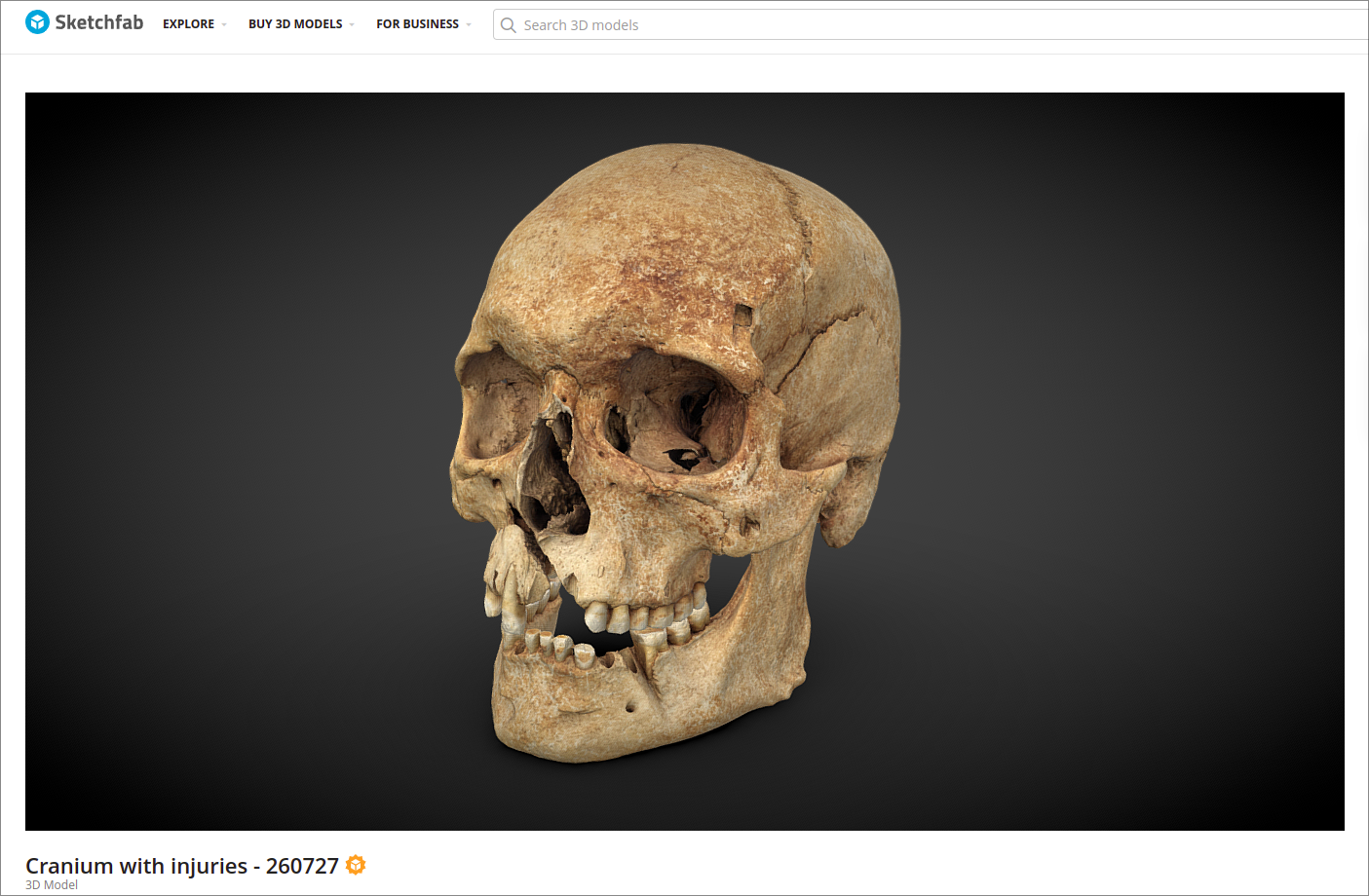
Fig. 9 Captura de tela da visualização interativo do crânio 260272 pertencente ao acervo do Museu de História de Estocolmo (Historiska). Cranium with injuries - 260727 by Historiska is licensed under Creative Commons Attribution.¶
Captura de Tela¶
Em face da textura rica em contraste e da ausência de reflexão ou brilho (Fig. 9), o modelo se mostrou ideal para a digitalização 3D por fotogrametria, um processo de reconstrução 3D de objetos a partir de fotografias/imagens de um volume. De modo a mensurar a acurácia do modelo da fotogrametria em relação ao original, foi decidido capturar imagens e vídeos de telas de 4K (3840x2160 px) e 2K (fullhd, 1920x1080 px). Todo o trabalho inicial foi executado em um notebook e um computador, ambos rodando o Linux 3DCS, para a captura em vídeo utilizou-se o aplicativo SimpleScreenRecorder e para a captura das telas em imagens, utilizou-se o capturador padrão do sistema, acionado pela tecla Print Screen.
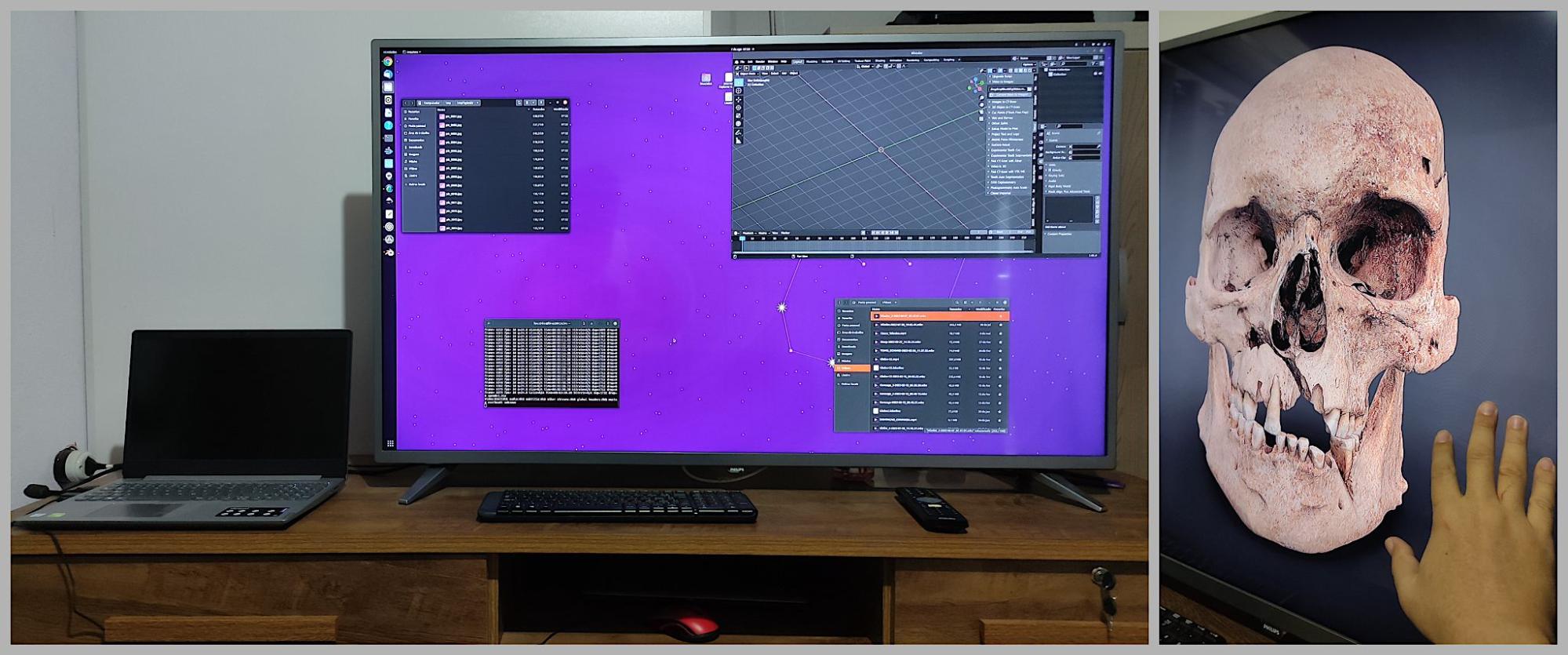
Fig. 10 Notebook com a saída de vídeo (HDMI) em um monitor 4K (à esquerda), ao lado os detalhes do crânio em zoom, com uma mão ao lado para se ter ideia da escala e resolução.¶
Todas as capturas foram efetuadas em um notebook (Fig. 10) Lenovo Ideapad S145, a resolução padrão do sistema já é 2K, de modo que não precisou ser feita nenhuma adaptação. Já para a captura 4K foi necessário conectar o notebook em um monitor Smart TV Ultra Slim 4K UHD. Foram feitas 4 capturas, duas delas de imagens 2K e 4K e duas delas de vídeo 2K e 4K. Os vídeos foram convertidos em imagens com a ferramenta Video to Images do OrtogOnBlender [B1] [B2], resultando em quatro diretórios (disponíveis para download):
2K_img: 147 imagens;
2K_video: 145 imagens;
4K _mg: 144 imagens;
4K_video: 144 imagens.

Fig. 11 Imagens com a nitidez exacerbada de modo a evidenciar a perda de dados no vídeo.¶
Em um primeiro momento é possível notar que há uma significativa perda de qualidade nas imagens advindas da conversão feita a partir do vídeo (Fig. 11), algo esperado posto que os codecs atuais costumam comprimir significativamente os quadros. É importante observar também que, mesmo se tratando de imagens 2K e 4K, o crânio sempre foi capturado completamente, de modo que a sua resolução é significativamente inferior do que a total.
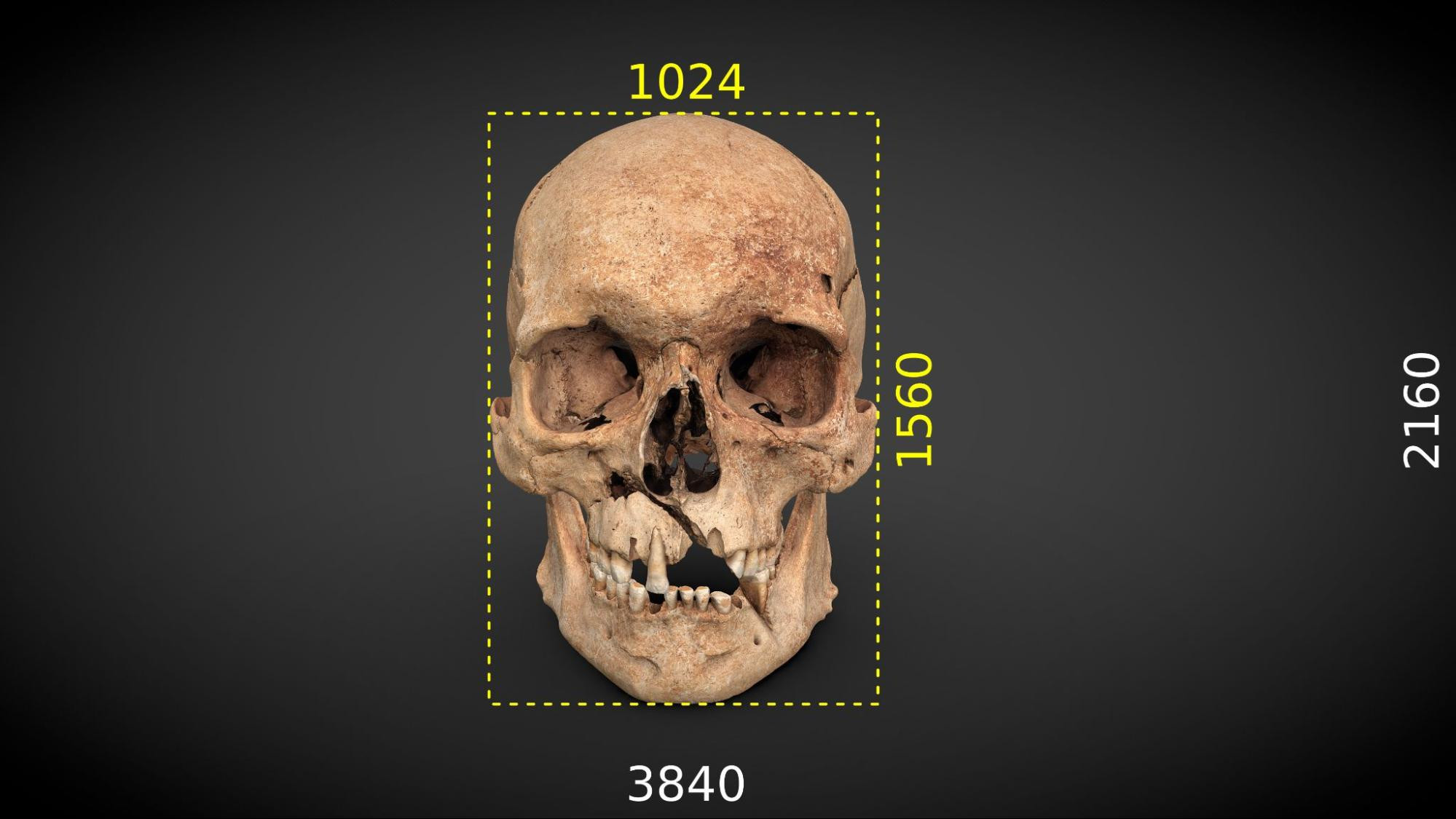
Fig. 12 Região útil dentro de uma imagem 4K.¶
Tomando uma captura onde o crânio aparece frontalmente e traçando um retângulo correspondente a região ocupada pela peça, resultam-se as dimensões de 1024 x 1560 px (Fig. 12), ou seja 1.6 MP (megapixel), o que corresponde 19,3% da resolução total de 8.29 MP (3840 x 2160 px), e ainda há regiões vazias nesse retângulo menor, ou seja, nem sempre uma grande resolução total é garantia de que a peça siga o mesmo parâmetro.
Software Utilizado na Primeira Etapa¶
Para digitalizar os modelos a partir de fotos, foram escolhidas 4 soluções:
Metashape: Software standalone da Agisoft, fechado, pago (US $179) e multiplataforma. Trata-se de um dos melhores aplicativos para fotogrametria disponível no mercado.
OpenMVG + OpenMVS: Software livre, gratuito e multiplataforma, disponível no OrtogOnBlender [B3] [B4].
SMVS + MVE: Software livre, gratuito e multiplataforma, disponível no OrtogOnBlender [B5].
Meshroom: Software livre, gratuito e multiplataforma, disponível no OrtogOnBlender.
As malhas resultantes foram alinhadas no OrtogOnBlender e exportadas no formato STL, de modo a serem comparadas no software CloudCompare, que gerou o histograma, a média e o desvio padrão em relação ao modelo original.
Configuração dos Microcomputadores¶
Máquina 1 - Desktop:
Processador Intel Core I9 9900K 3.6 GHZ/16M; 64 GB de memória RAM;
GPU GeForce 8 GB GDDR6 256-bit RTX 2070;
Placa mãe Gigabyte 1151 Z390; SSD SATA III 960 GB 2.5”;
SSD SATA III 480 GB 2.5”;
Water Cooler Masterliquid 240V.
Máquina 2 - Notebook:
Processador Intel Core i7-8565U 1.80GHz;
20 GB de memória RAM;
GPU NVidia Geforce MX110 de 2GB GDDR5;
SSD m2 256 GB; SSD SATA III 480 GB 2.5”.
Resultados e Discussão¶
Resultados Iniciais no CloudCompare¶
Ao todo foram efetuadas 20 digitalizações, sendo 5 com o Metashape, 7 com o OpenMVG+OpenMVS, 4 com o SMVS+MVE e 4 com o Meshroom. Cada modelo digitalizado foi comparado com o .OBJ baixado do Skechfab. O CloudCompare gerou um histograma que é apresentado na parte direita e já é possível analisar uma série de características de cada software.
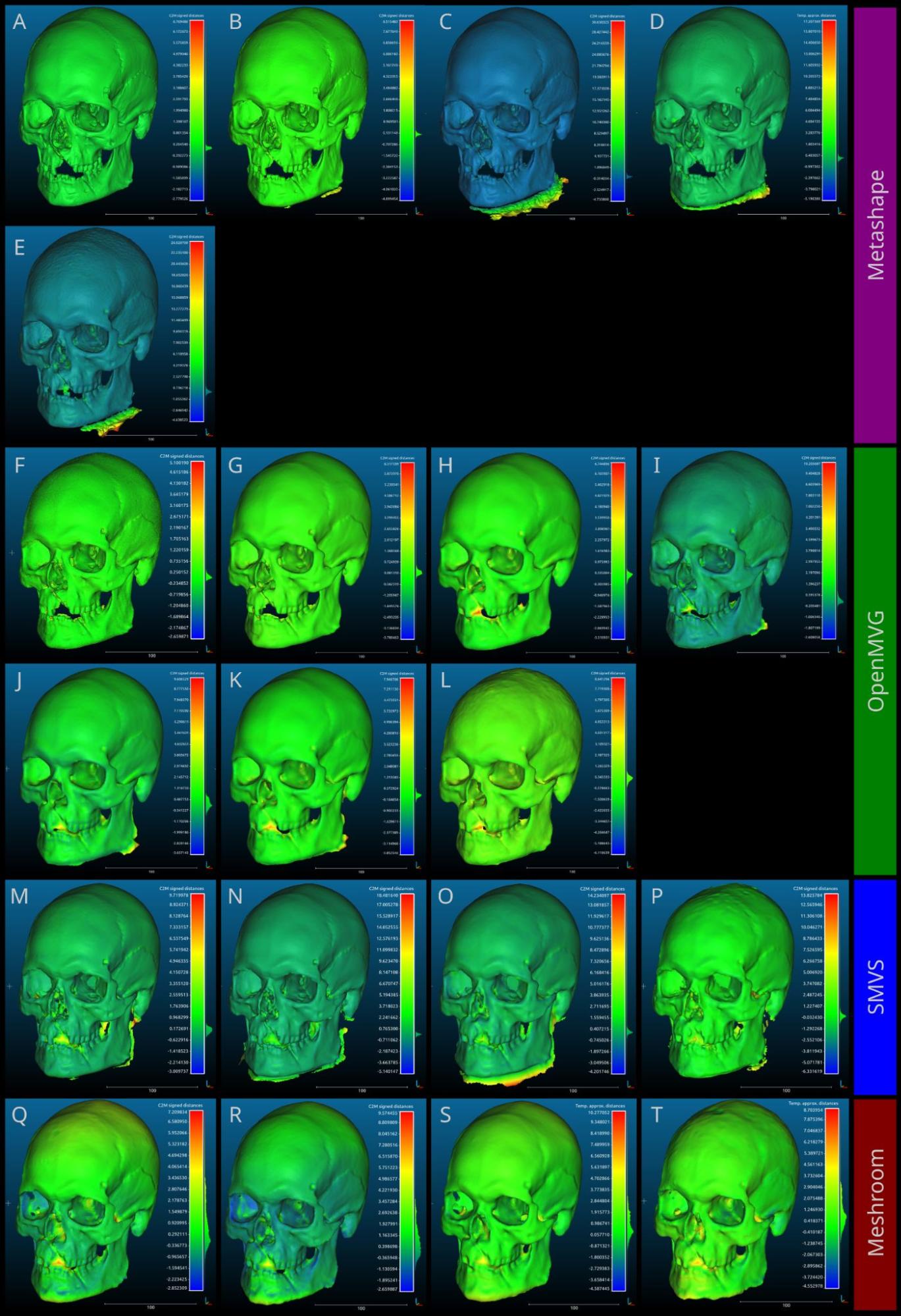
Fig. 13 Comparações efetuadas no software CloudCompare.¶
Metashape (MSP)¶
O modelo advindo das imagens 4K capturadas uma a uma (4k img ULTRA MSP), foi rodado no modo Utra High (Fig. 13, A), apresentando um elevadíssimo número de detalhes, quase sem ruído algum. O modelo advindo das imagens capturadas uma a uma (4k img MSP), foi rodado no modo High (Fig. 13, B), apresentando um elevadíssimo número de detalhes e um pequeno volume de ruído. O modelo advindo das imagens convertidas da gravação em vídeo 4K (4k video MSP), foi rodado no modo High (Fig. 13 , C), apresentando um elevadíssimo número de detalhes e um significativo volume de ruído. O modelo advindo das imagens 2K capturadas uma a uma (2k img MSP), foi rodado no modo High (Fig. 13, D), apresentando um elevado número de detalhes e um significativo volume de ruído. O modelo advindo das imagens convertidas da gravação em vídeo 2K (2k video MSP), foi rodado no modo High (Fig. 13, E), apresentando um elevado número de detalhes e um significativo volume de ruído. Em linhas gerais, mesmo com o ruído, os vértices próximo a distância zero foram a grande maioria, criando um histograma bastante condensado.
OpenMVG+OpenMVS (MVG)¶
O modelo advindo das imagens 4K capturadas uma a uma (4k img 1 1 MVG), foi rodado com o F Factor e o Smooth Factor em 1 e o Decrease picture size desabilitado (Fig. 13, F), apresentando um bom número de detalhes, quase sem ruído algum. O modelo advindo das imagens 4K capturadas uma a uma (4k img MVG), foi rodado com o F Factor e o Smooth Factor em 4 e o Decrease picture size desabilitado (Fig. 13, G), apresentando um bom número de detalhes, quase sem ruído algum. O modelo advindo das imagens convertidas da gravação em vídeo 4K (4k video MVG), foi rodado com o F Factor e o Smooth Factor em 4 e o Decrease picture size desabilitado (Fig. 13, H), apresentando um bom número de detalhes, com pouco ruído. O modelo advindo das imagens 4K capturadas uma a uma (4k img dec MVG), foi rodado com o F Factor e o Smooth Factor em 4 e o Decrease picture size habilitado (Fig. 13, I), apresentando um bom número de detalhes e um pequeno volume de ruído. O modelo advindo das imagens convertidas da gravação em vídeo 4K (4k video dec MVG), foi rodado com o F Factor e o Smooth Factor em 4 e o Decrease picture size habilitado (Fig. 13, J), apresentando um bom número de detalhes e um pequeno volume de ruído. O modelo advindo das imagens 2K capturadas uma a uma (2k img MVG), foi rodado com o F Factor e o Smooth Factor em 4 (Fig. 13, K), apresentando um bom número de detalhes e um pequeno volume de ruído. O modelo advindo das imagens convertidas da gravação em vídeo 2K (2k video MVG), foi rodado com o F Factor e o Smooth Factor em 4 (Fig. 13, L), apresentando um bom número de detalhes, quase sem ruído algum. Em linhas gerais, mesmo com o ruído, os vértices próximo a distância zero foram a grande maioria, criando um histograma bastante condensado.
SMVS¶
O modelo advindo das imagens 4K capturadas uma a uma (4k img SMVS), foi rodado com o Decrease scanning time desabilitado (Fig. 13, M), apresentando um bom número de detalhes e um pequeno volume de ruído. O modelo advindo das imagens convertidas da gravação em vídeo 4K (4k video SMVS), foi rodado com o Decrease scanning time desabilitado (Fig. 13, N), apresentando um bom número de detalhes e um significativo volume de ruído. O modelo advindo das imagens 2K capturadas uma a uma (2k img SMVS), foi rodado com o Decrease scanning time desabilitado (Fig. 13, O), apresentando um bom número de detalhes e um significativo volume de ruído. O modelo advindo das imagens convertidas da gravação em vídeo 2K (2k video SMVS), foi rodado com o Decrease scanning time desabilitado (Fig. 13, P), apresentando um bom número de detalhes e um pequeno volume de ruído. Em linhas gerais, mesmo com o ruído, os vértices próximo a distância zero foram a grande maioria, criando um histograma bastante condensado.
Meshroom (MR)¶
O modelo advindo das imagens 4K capturadas uma a uma (4k img MR) (Fig. 13, Q), apresentou um bom número de detalhes e bem pouco ruído na região dos dentes. O modelo advindo das imagens convertidas da gravação em vídeo 4K (4k video MR) (Fig. 13, R), apresentou um bom número de detalhes e bem pouco ruído na região dos dentes. O modelo advindo das imagens 2K capturadas uma a uma (2k img MR) (Fig. 13, S), apresentou um bom número de detalhes e bem pouco ruído na região dos dentes. O modelo advindo das imagens convertidas da gravação em vídeo 2K (2k video MR) (Fig. 13, T), apresentou um bom número de detalhes e bem pouco ruído na região dos dentes. Em linhas gerais, mesmo baixo nível de ruído, os vértices próximo a distância zero não foram tão constantes como aquele dos outros sistema de fotogrametria, criando um histograma significativamente espalhado.
Análise Inicial dos Gráficos¶
Uma série de gráficos foram gerados durante os estudos e dois deles escolhidos para a apresentação dos dados, posto que ilustram com relativa simplicidade a acurácia e o custo-benefício em se tratando do processamento e tempo envolvidos para a digitalização dos modelos.
Por default o CloudCompare fornece a informação da média (mean) e do desvio padrão (SD) das distâncias entre os modelos comparados. A média não costuma ser um dado robusto, posto que pode ocultar uma grande variação de distâncias, caso estas sejam simétricas. Neste quesito o desvio padrão é um dado mais consistente, pois informa a faixa onde se encontram o maior número de pontos, no entanto, ele sozinho não informa acerca da compatibilidade volumétrica do modelo original em relação ao digitalizado, pois podem haver ruídos e ausências no processo. Para reforçar a análise foram levantados os volumes de todas as digitalizações e comparadas com o modelo original, extraindo a porcentagem a mais (Volume+ %) de cada um: ((Modelo atual - Modelo original)*100)/Modelo original.
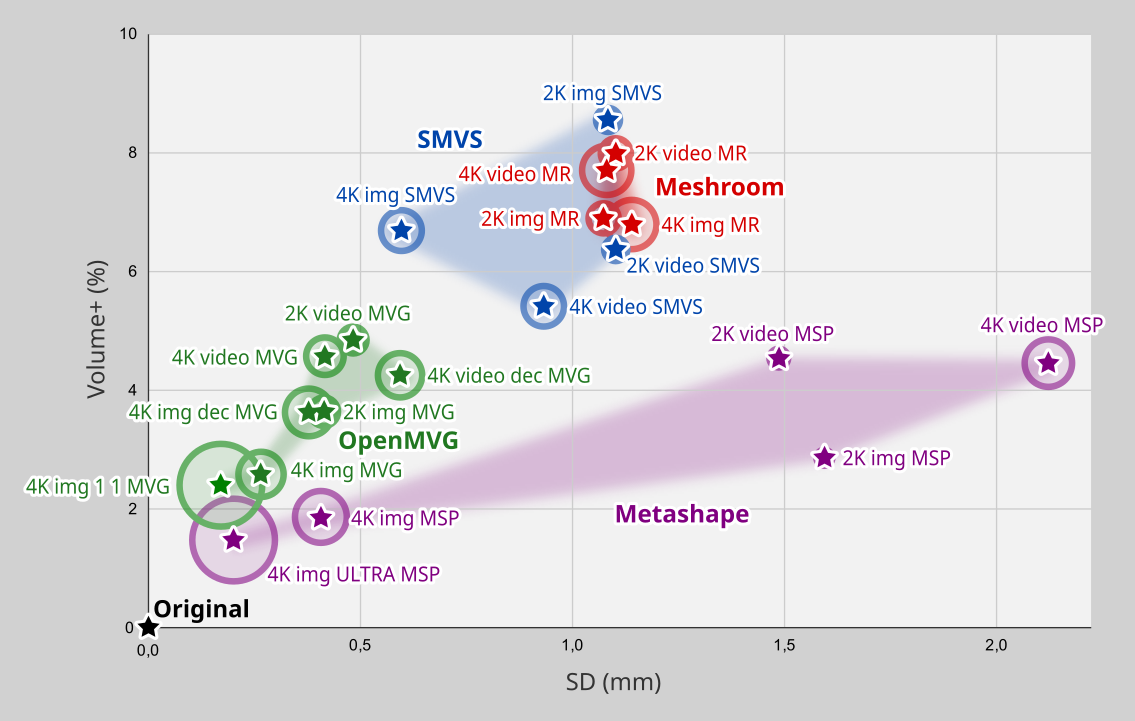
Fig. 14 Gráfico de distribuição: desvio padrão (SD) vs porcentagem de volume a mais em relação ao original (Volume+ %) vs tempo de processamento (dimensão do círculo).¶
O gráfico resultante (Fig. 14) apresenta o modelo Original na origem do quadrante à esquerda inferior e quanto mais próximo ao Original estiver o resultado, tanto melhor será o mesmo. O modelo mais próximo à origem é o 4K img ULTRA MSP e o segundo o 4K img 1 1 MVG. Isso mostra que a digitalização efetuada no Metashape foi aquela com os melhores resultados, seguido de uma executada pelo OpenMVG+OpenMVS. É curioso observar que, mesmo tento o melhor resultado global, há um distanciamento significatico no eixo X (SD) entre os modelos do Metashape. Ora, se o software apresentou o melhor resultado qual é o motivo de tal discrepância? Simples, a geração de ruído criou malhas que aumentaram o valor do desvio padrão, mas mesmo com essas malhas a mais o volume do modelo final não cresceu significativamente, evidenciando que, mesmo com ruído, os modelos do Metashape se mantiveram fiéis ao volume do Original. Mais a frente se observará que os detalhes da superfície são bem maiores neste software do que nos outros e isso explica substancialmente a coerência volumétrica. Já o OpenMVG+OpenMVS não digitalizou modelos tão detalhados, mas foi mais eficiente em isolar o modelo, sem gerar tantos ruídos. Com resultados globalmente mais distantes, o SMVS e o Meshroom se afastaram um pouco dos demais, sendo que o primeiro se saiu melhor do que o segundo em linhas gerais. Apesar do gráfico apresentar dados de tempo no diâmetro dos marcadores, não fica muito claro o custo-benefício do mesmo em relação aos resultados e buscando evidenciar tal abordagem, um outro gráfico foi plotado (Fig. 15), com os dados da máquina utilizada e do tempo gasto nas digitalizações.
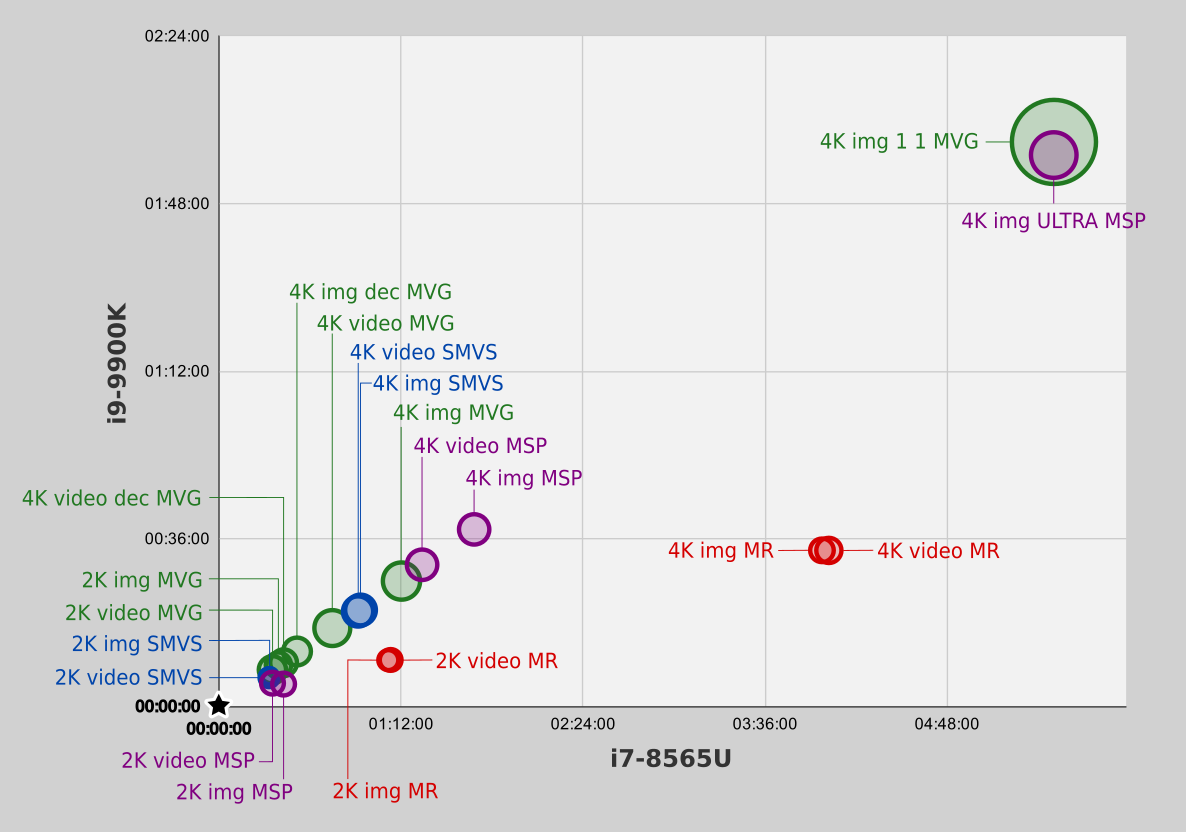
Fig. 15 Gráfico de comparação temporal, com a dimensão do arquivo representada pelo círculo.¶
O eixo Y é representado pelos resultados obtidos no Desktop com o processador i9 e o eixo X no notebook com o processador i7. O diâmetro dos círculos corresponde ao tamanho dos arquivos finais (STL sem textura). O tempo de digitalização dos dois modelos melhores posicionados no gráfico anterior os colocam bem distante dos demais, levantando questões acerca do custo benefício da geração dos mesmos, principalmente se a máquina utilizada for mais modesta.
Complemento com o RealityCapture e o Zephyr¶
De modo a melhorar a comparação entre soluções de fotogrametria, foram rodados mais testes com dois softwares standalone, o RealityCapture e o 3DF Zephyr. Ambos não oferecem o mesmo suporte aos sistemas operacionais dos demais citados e os testes foram executados em computadores diferentes dos supracitados neste estudo, de modo que avaliou-se apenas a questão estrutural e não o tempo de digitalização.

Fig. 16 Comparações efetuadas no software CloudCompare.¶
RealityCapture (MSP)¶
O modelo advindo das imagens 4K capturadas uma a uma (4k img HD RC), foi rodado no modo HD (Fig. 16, A), apresentando um elevadíssimo número de detalhes, quase sem ruído algum. O modelo advindo das imagens capturadas uma a uma (4k img RC), foi rodado no modo Normal (Fig. 16, B), apresentando um elevadíssimo número de detalhes, quase sem ruído algum. O modelo advindo das imagens convertidas da gravação em vídeo 4K (4k video RC), foi rodado no modo Normal (Fig. 16, C), apresentando um elevadíssimo número de detalhes, quase sem ruído algum. O modelo advindo das imagens 2K capturadas uma a uma (2k img RC), foi rodado no modo Normal (Fig. 16, D), apresentando um elevadíssimo número de detalhes, quase sem ruído algum. O modelo advindo das imagens convertidas da gravação em vídeo 2K (2k video MSP), foi rodado no modo Normal (Fig. 16, E), apresentando um elevado número de detalhes e um pequeno volume de ruído. Em linhas gerais, os vértices próximo a distância zero foram a grande maioria, criando um histograma bastante condensado.
3DF Zephyr (ZPY)¶
O modelo advindo das imagens capturadas uma a uma (4k img ZPY), foi rodado no modo Normal (Fig. 16, F), apresentando um elevadíssimo número de detalhes, quase sem ruído algum. O modelo advindo das imagens convertidas da gravação em vídeo 4K (4k video ZPY), foi rodado no modo Normal (Fig. 16, G), apresentando um elevadíssimo número de detalhes, quase sem ruído algum. O modelo advindo das imagens 2K capturadas uma a uma (2k img ZPY), foi rodado no modo Normal (Fig. 16, H), apresentando um elevadíssimo número de detalhes e um pequeno volume de ruído. O modelo advindo das imagens convertidas da gravação em vídeo 2K (2k video ZPY), foi rodado no modo Normal (Fig. 16, I), apresentando um elevado número de detalhes e um pequeno volume de ruído. Em linhas gerais, os vértices próximo a distância zero foram a grande maioria, criando um histograma bastante condensado.
Análise Gráfica Completa¶
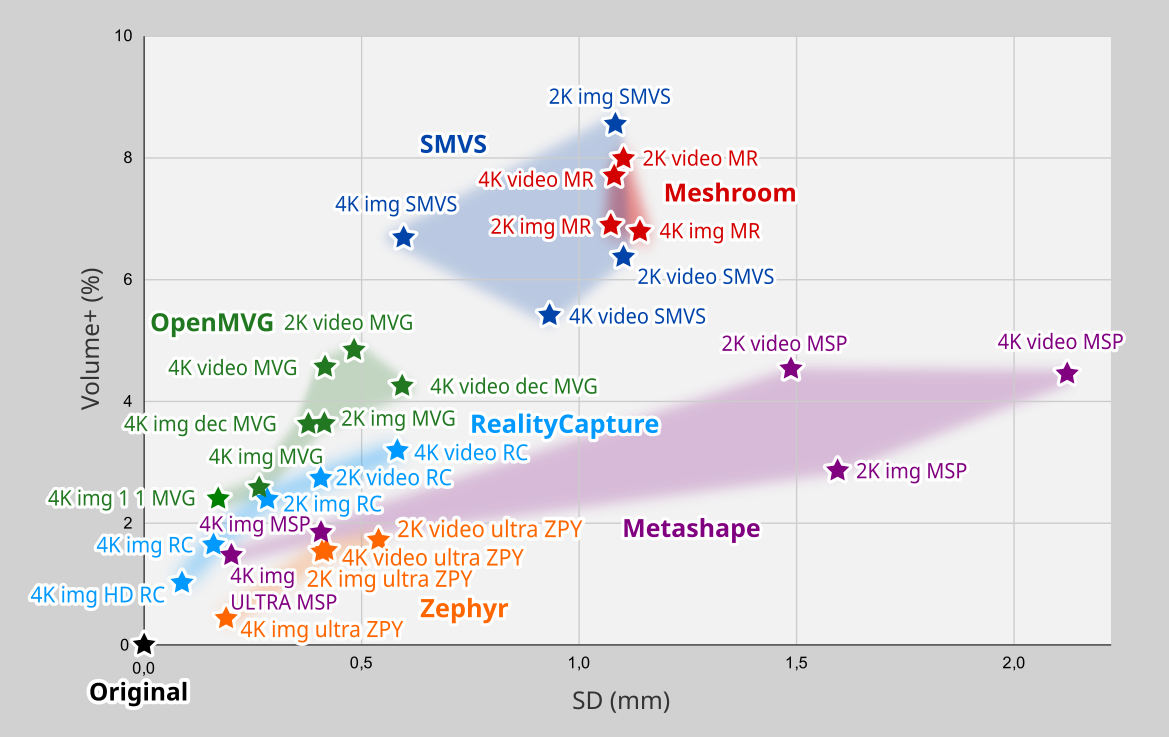
Fig. 17 Gráfico de distribuição: desvio padrão (SD) vs porcentagem de volume a mais em relação ao original (Volume+ %) vs tempo de processamento (dimensão do círculo).¶
Com o incremento dos dados foi rodado um novo gráfico (Fig. 17), posicionando o grupo composto pelos modelos gerados no RealityCapture e no Zephyr. Nos dois casos percebe-se um agrupamento maior do que no Metashape e isso indica que os modelos não geraram muito ruído. Os dois programas geraram modelos com o volume muito compatível com o original (.OBJ) e ainda que o desvio padrão diferiu nos melhores resultados fica difícil ter certeza de qual se saiu melhor.
Fig. 18 Gráfico de distribuição: desvio padrão (SD) vs porcentagem de volume a mais em relação ao original (Volume+ %).¶
Ao se simplificar os gráficos (Fig. 18) a dúvida de qual se saiu melhor persiste, pois, de um lado o RealityCapture gerou um desvio padrão menor do que 0,10 mm, mas um volume ligeiramente maior do que 1%. Já o Zephyr gerou um desvio padrão um pouco menor do que 0,20 mm, mas um volume menor do que 0,5%.
Uma forma de se chegar a um fator justo, frente aos dados apresentados, é multiplicar o volume pelo desvio padrão. Assim evidencia-se qual modelo está mais próximo ao Original, possibilitando o ranqueamento dos resultados.
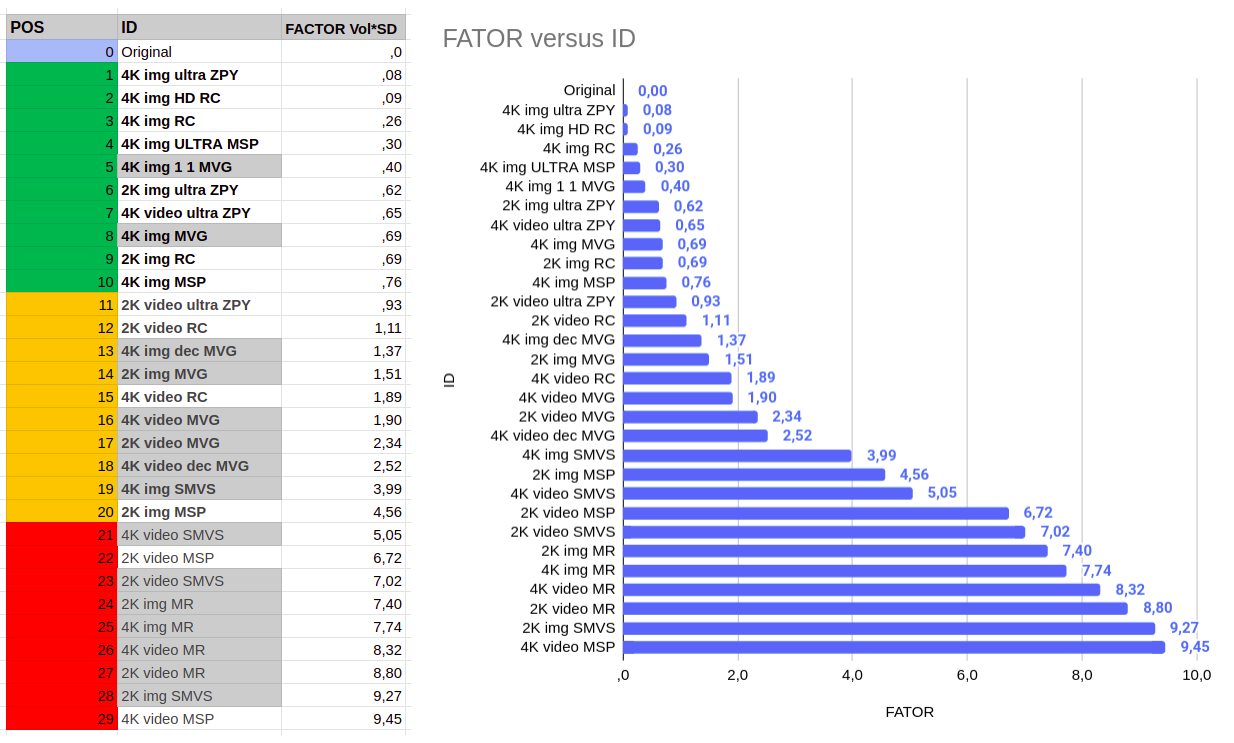
Fig. 19 Ranking baseado no fator Volume*SD.¶
Ao se ranquear os resultados (Fig. 19), fica evidente a pequena diferença entre o Zephyr em primeiro e o RealityCapture em segundo e terceiro. Em seguida desponta o modelo gerado no Metashape, em quarto, o modelo do OpenMVG+OpenMVS em quinto fechando o top 5. Curiosamente, entre o top 10 encontram-se dois modelos gerados no OpenMVG+OpenMVS, evidenciando a qualidade do software livre entre o domínio dos pagos. Também percebe-se a superioridade do OpenMVG+OpenMVS frente às outras soluções gratuitas e disponíveis no OrtogOnBlender, o SMVS e o Meshroom.
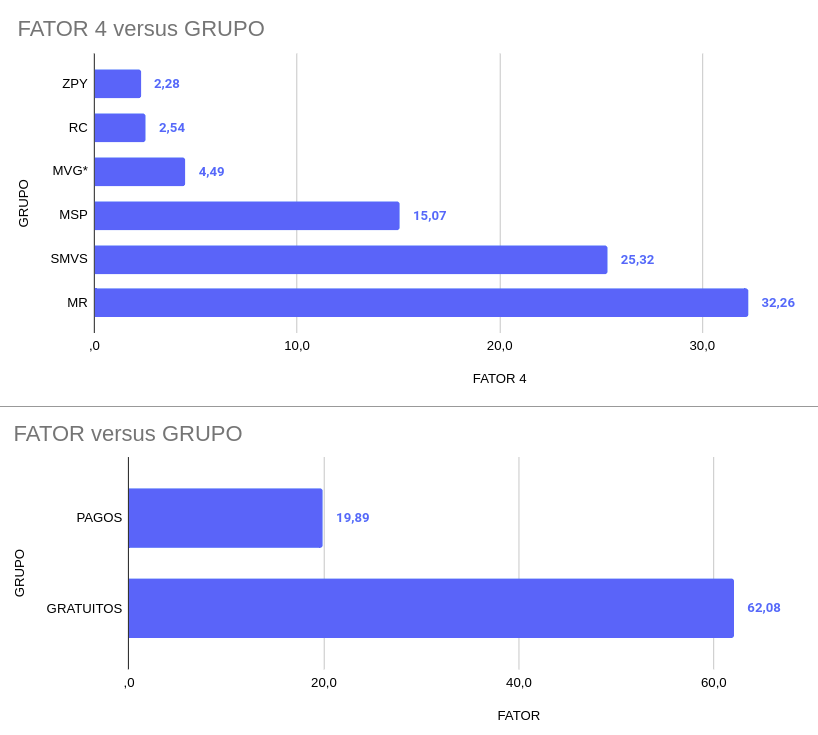
Fig. 20 Ranking baseado no fator Volume*SD - Programas individualizados e em grupo de pagos e gratuitos.¶
Ao se agrupar todos os fatores, retirando os modelos reduzidos do OpenMVG, pois não se adequam ao 4K ou ao 2K, temos um ranking geral, tendo o Zephyr em primeiro, o RealityCapture em segundo, o OpenMVG+OpenMVS em terceiro, o Metashape em quarto, o SMVS em quinto e o Meshroom em sexto (Fig. 20). Ao se juntar todos os resultados, e comparar as soluções gratuitas versus a paga, temos uma diferença sifnificativa no fator, de pouco mais de 3 vezes. No entanto, tal fator, como já comentado, evidencia apenas a compatibilidade estrutural e não o detalhamento da superfície.
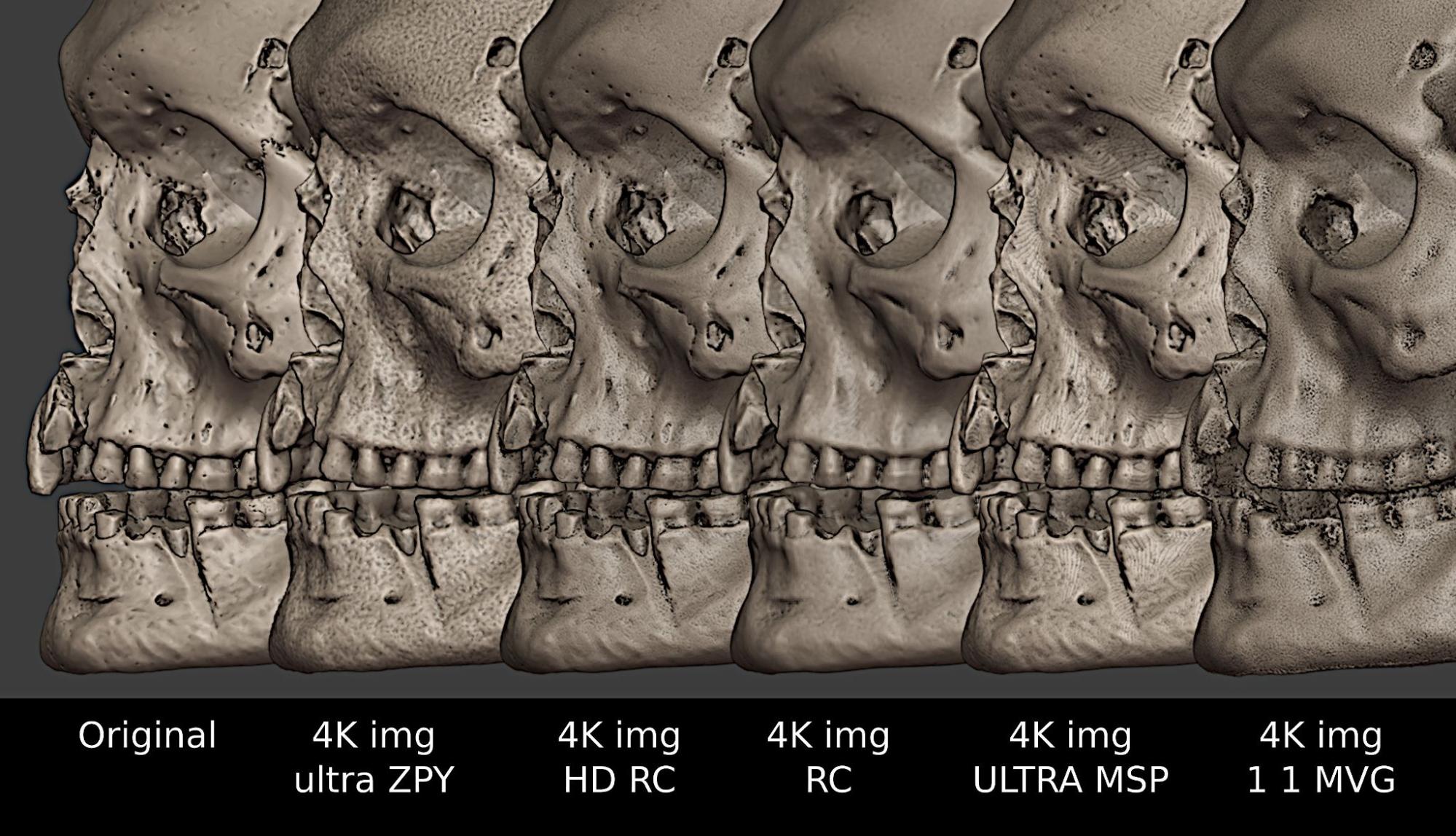
Fig. 21 Comparação entre as malhas.¶
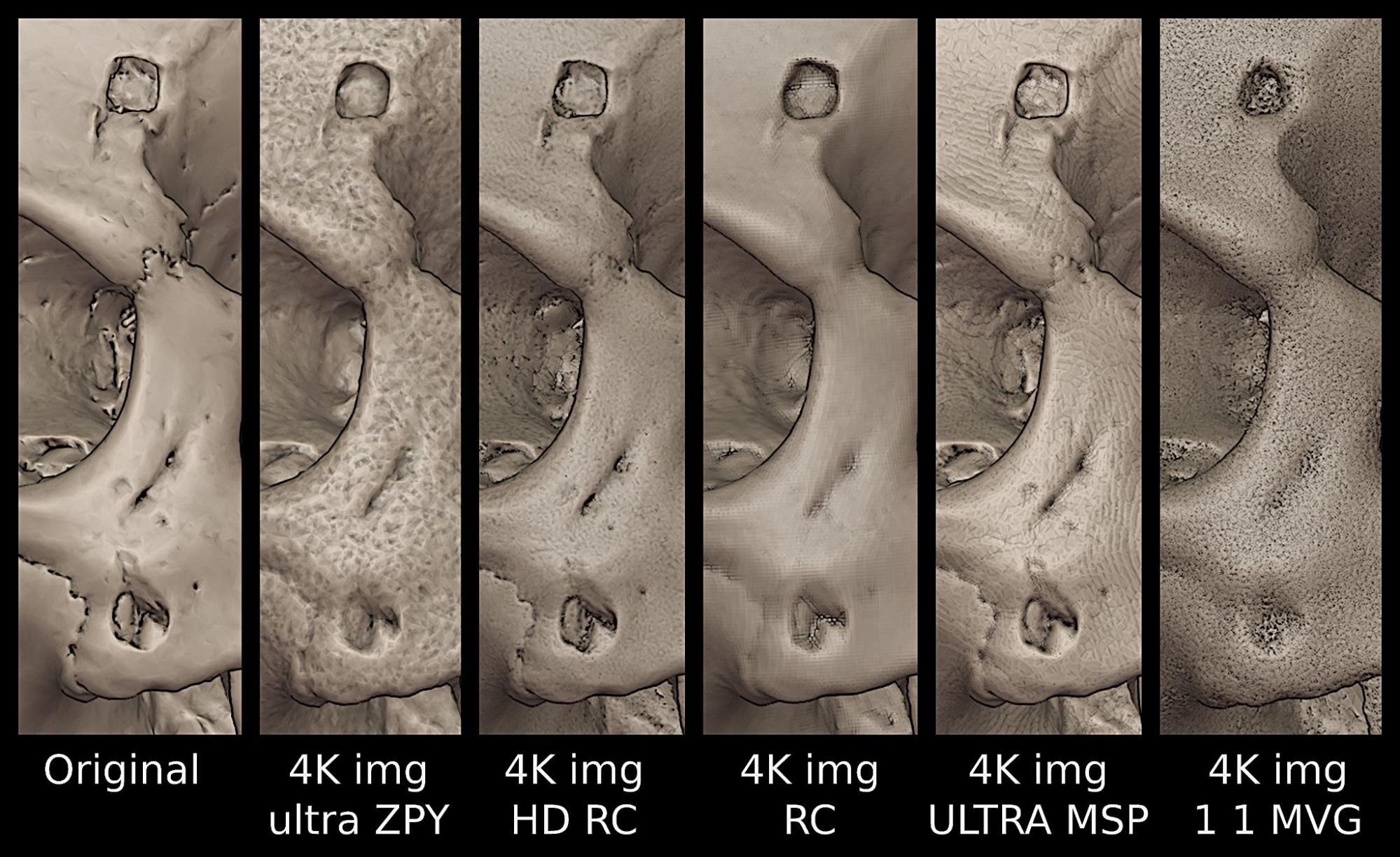
Fig. 22 Comparação entre as malhas.¶
Ao se analisar cuidadosamente os detalhes da superfície (Fig. Fig. 21 e Fig. 22), percebe-se que o Metashape gerou a malha mais detalhada dentre todas, seguido pelo RealityCapture e pelo Zephyr. Já o OpenMVG+OpenMVS, apesar de criar um modelo sem ruídos que alterassem o fator do volume e desvio padrão, é dotado de uma superfície pobre em detalhes quando comparada com as outras.
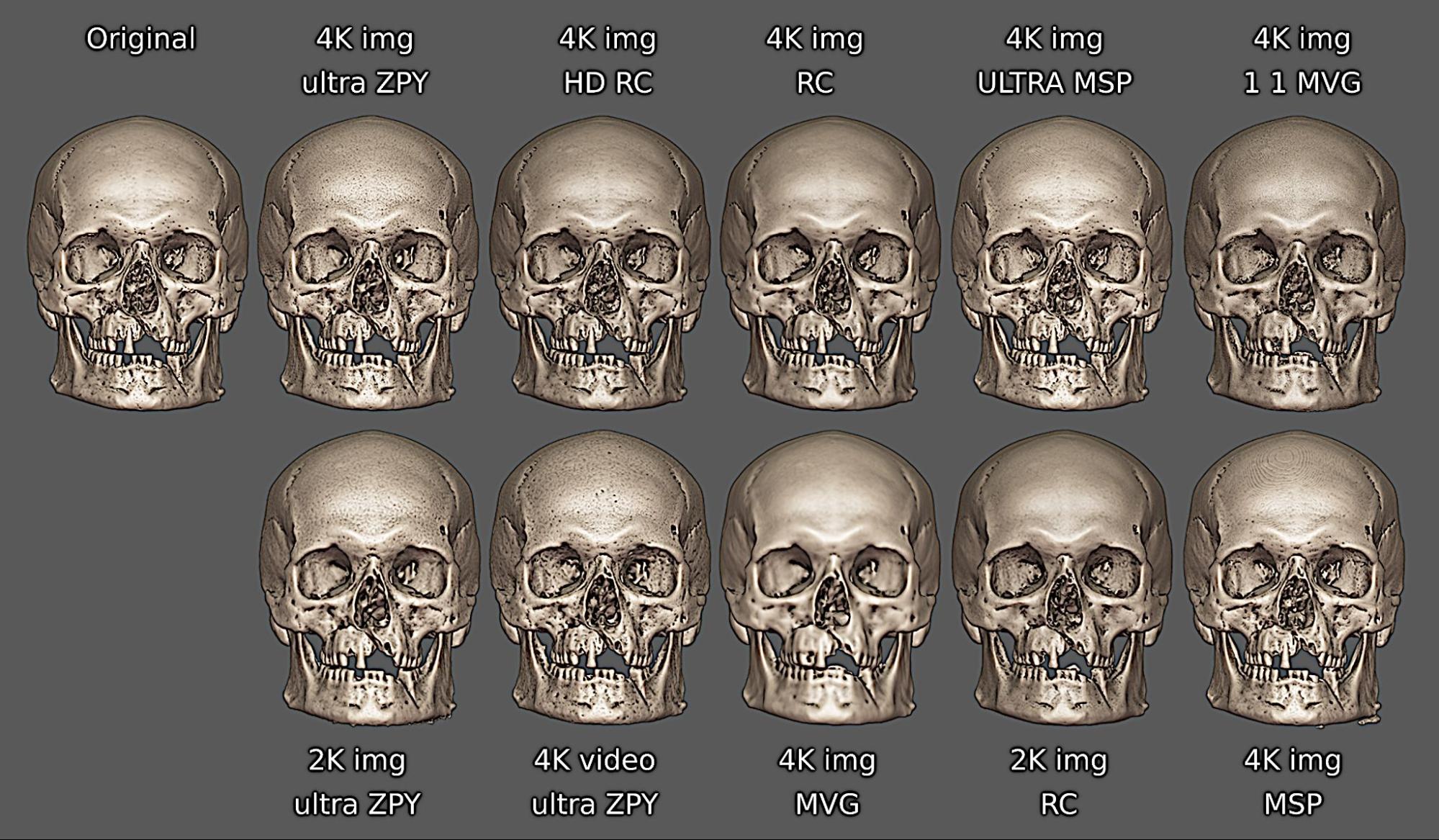
Fig. 23 Comparação entre as malhas.¶
Ao se alinhar visualmente os dez melhores resultados (Fig. 23), atesta-se o poder de detalhamento dos programas pagos e fechados, frente ao OpenMVG+OpenMVS. Se o Metashape não tivesse gerado tanto ruído, certamente seria o primeiro colocado no contexto geral.
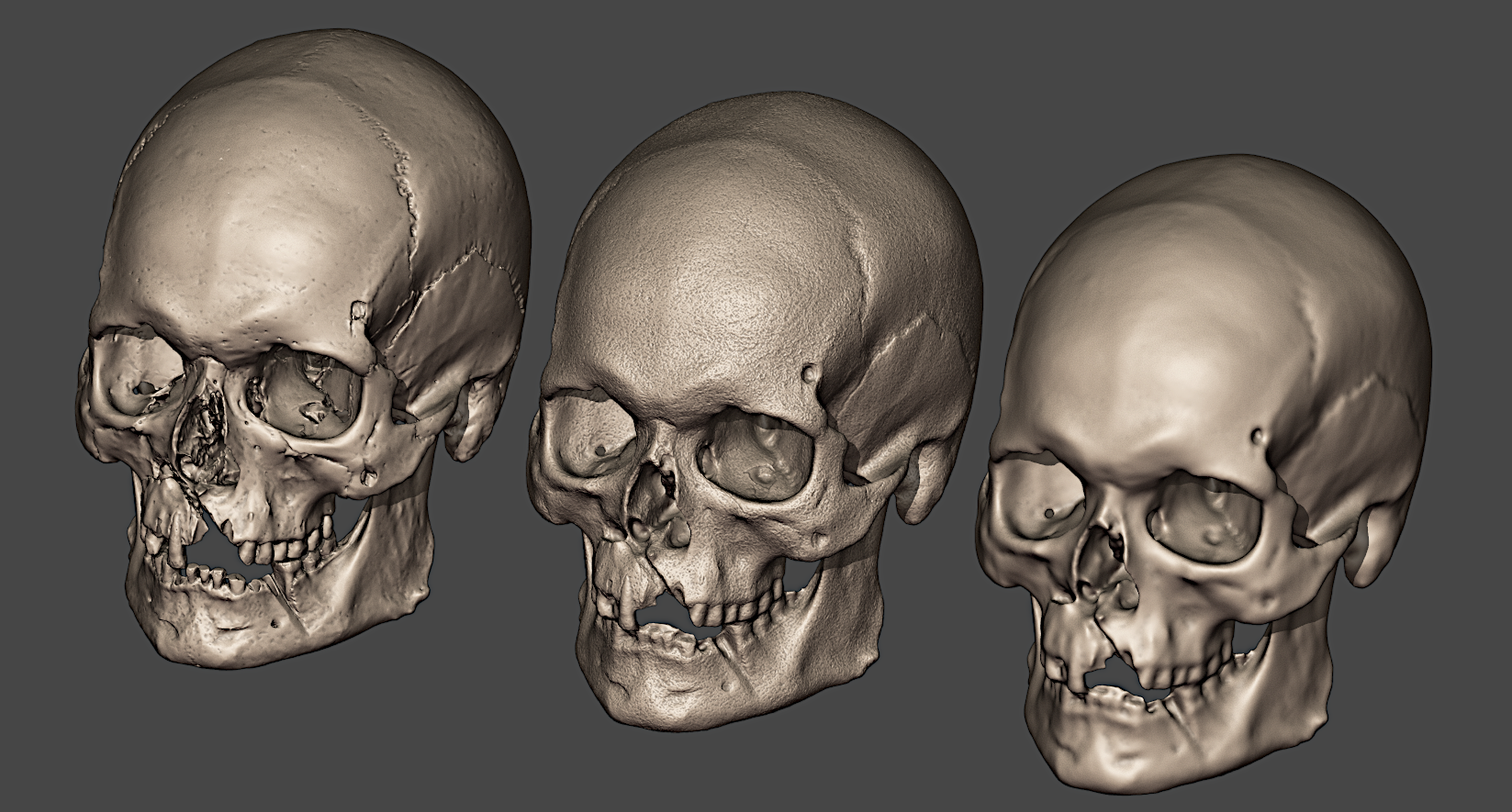
Fig. 24 Modelo original à esquerda, modelo 4K img MVG com o Displacemente ativado ao centro e o mesmo modelo sem o Displacemente à direita.¶
Uma forma de se contornar a ausência de detalhes é ativar o modificador Displacement (Fig. 24), já presente no modelo gerado pelo OpenMVG+OpenMVS do OrtogOnBlender. Não se trata da superfície estritamente real, mas tem servido ao propósito de enriquecimento dos detalhes da superfície em casos reais de próteses faciais [B6] [B7], o que levanta a questão acerca do que espera-se de um modelo em aplicações críticas.
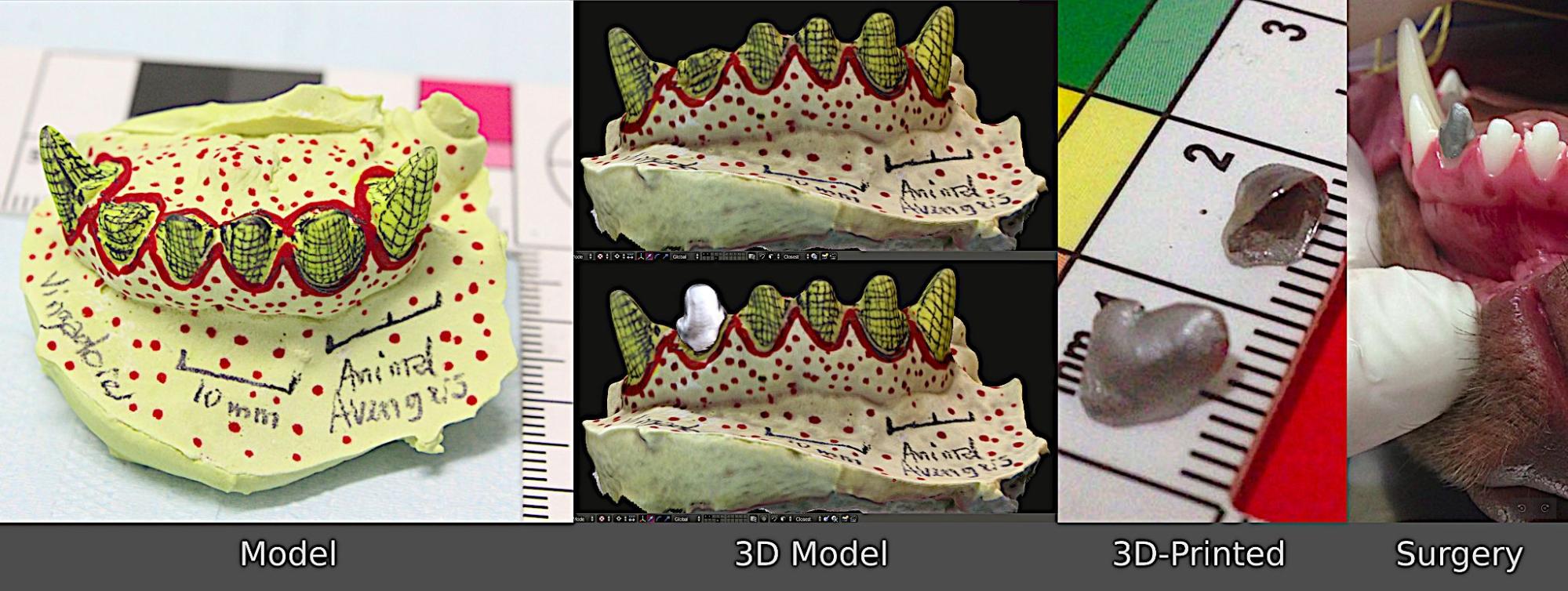
Fig. 25 Passo-a-passo da criação de uma prótese dentária canina.¶
Já o SMVS que apresentou resultados distantes do OpenMVG+OpenMVS, posicionando-se em 19º, 21º, 23º e 28º de 29 modelos avaliados, foi utilizado em um projeto de confecção de coroa dentária (Fig. 25), o que pedia alta precisão no escaneamento dos modelos. Além do dente, o SMVS foi utilizado em outra situação crítica, a prótese do bico de um araçari (Pteroglossus aracari).
De todos os programas e bibliotecas aqui testados, o único ainda não utilizado pelos autores em projetos efetivos foi o Meshroom, mas mesmo ele apresenta resultados dentro da margem de erro necessárias para a reconstrução facial forense, por exemplo.
Conclusão¶
Depois de analisar todos os resultados é possível se atentar para algumas situações:
Os programas pagos geram resultados melhores do que os gratuitos, principalmente nos detalhes da superfície, mas os gratuitos não se afastam tanto dos pagos, tendo muitas vantagens e no final das contas equiparando-se num contexto geral. Um bom exemplo disso é a possibilidade de gerar um modelo já orientado e na escala correta, usando marcadores ArUco com o OpenMVG+OpenMVS [B8];
As imagens 4K geram resultados melhores do que aqueles das imagens 2K;
Imagens das telas capturadas geram resultados melhores do que aquele dos vídeos convertidos em imagens;
Um modelo com volume compatível e desvio padrão baixo não é determinante para a qualidade dos detalhes da superfície.
Se a qualidade dos detalhes não for essencial, soluções mais simples geram bons modelos sem necessitar de muito tempo para tal;
Todos os modelos gerados podem ser utilizados em um trabalho de aproximação facial forense, ou seja, mesmo com qualidade diferente, todas soluções utilizadas podem ser aplicadas;
Ainda que tenha gerado valores distantes dos melhores programas, mesmo o SMVS pode ser utilizado em digitalizações críticas que pedem alta resolução nos modelos;
O presente estudo corrobora com outro, apresentado em 2013 [B9] e que evidenciava a precisão de software gratuito e de código aberto na fotogrametria para as ciências forenses, gerando modelos com precisão submilimétrica;
Em linhas gerais, levando em consideração a coerência estrutural e o detalhamento dos modelos, o resultado final seria: RealitityCapture >= Metashape > 3DF Zephyr > OpenMVG+OpenMVS > SMVS > Meshroom.
Agradecimentos¶
Ao Museu de História de Estocolmo por disponibilizar o modelo 3D utilizado neste capítulo.
Dados e Tabelas Complementares¶
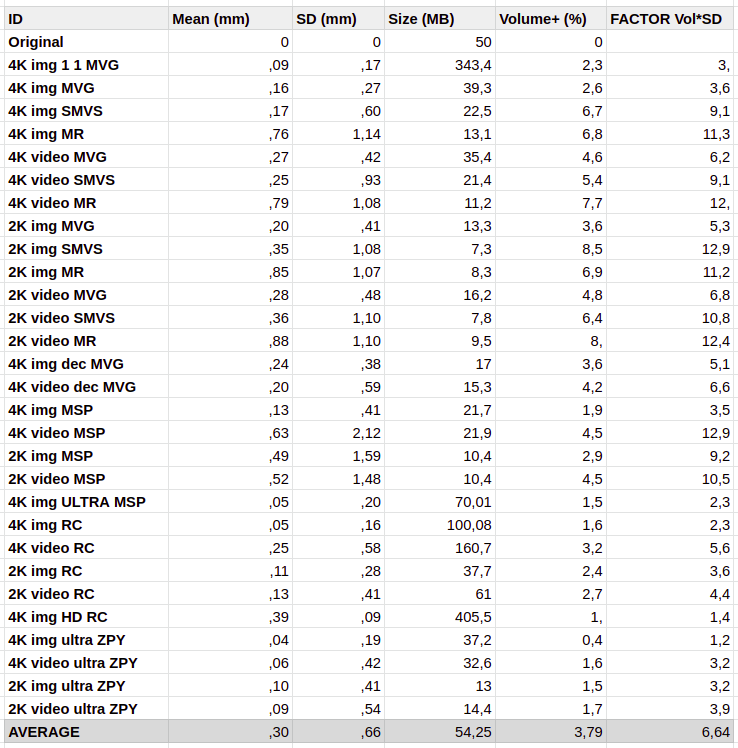
Esta seção conta com as tabelas contendo os dados utilizados para plotar os gráficos apresentados neste capítulo.
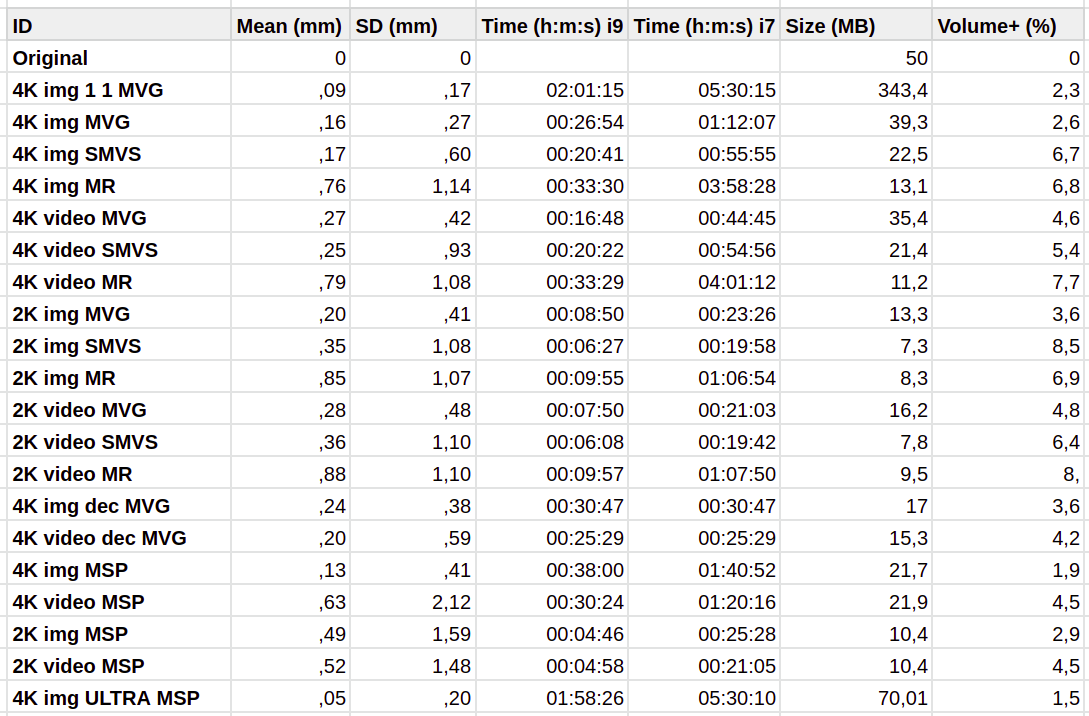
Fig. 26 Tabela 1.¶
- B1
Moraes, C., Dornelles, R., & Rosa, E. da . (2021). Digitalização 3D de Faces a partir de Vídeos. https://doi.org/10.6084/m9.figshare.14075456.v1
- B2
Santos, M. E., Moraes, C., Bezzi, L., & Bezzi, A. (2021). Digitalização 3D a partir de Vídeo de Drones Disponíveis na Internet. figshare. https://doi.org/10.6084/m9.figshare.14115479.v1
- B3
Moraes, C., Sobral, D. S., Mamede, A., & Beaini, T. L. (2021). Sistema Complementar de Projeção Nasal em Reconstruções/Aproximações Faciais Forenses. https://doi.org/10.6084/M9.FIGSHARE.17209379
- B4
Moraes, C., Dornelles, R., & Rosa, E. D. (2020). Fotogrametria 3D - Desempenho nos Sistemas Operacionais: Windows, Linux e Mac OS X. https://doi.org/10.6084/M9.FIGSHARE.13456442
- B5
Moraes, C., Dornelles, R., & Rosa, E. D. (2021). Digitalização 3D a partir de Fotografias com o SMVS e o MVE no OrtogOnBlender. https://doi.org/10.6084/M9.FIGSHARE.13549595
- B6
Salazar-Gamarra, R., Cárdenas-Bocanegra, A., Masch, U., Da Costa Moraes, C. A., Seelaus, R., Lopes Da Silva, J. V., & Lauria Dib, L. (2022). Color translation from monoscopic photogrammetry +ID Methodology into a Polyjet final 3D printed facial prosthesis. In F1000Research (Vol. 11, p. 582). F1000 Research Ltd. https://doi.org/10.12688/f1000research.111196.1
- B7
Salazar-Gamarra, Rodrigo and Cárdenas-Bocanegra, Andrés and Masch, Uri and Da Costa Moraes, Cícero André and Seelaus, Rosemary and Lopes Da Silva, Jorge Vicente and Lauria Dib, Luciano.(2019). INTRODUÇÃO À METODOLOGIA “MAIS IDENTIDADE”: PRÓTESES FACIAIS 3D COM A UTILIZAÇÃO DE TECNOLOGIAS ACESSÍVEIS PARA PACIENTES SOBREVIVENTES DE CÂNCER NO ROSTO. In Comunicação Científica e Técnica em Odontologia 2. Antonella Carvalho de Oliveira. https://doi.org/10.22533/at.ed.265192903
- B8
Moraes, C., Kimura, R. N., Bezzi, L., & Bezzi, A. (2022). Fotogrametria com Limpeza de Pontos, Alinhamento e Redimensionamento Automáticos no OrtogOnBlender. https://doi.org/10.6084/m9.figshare.19450283.v1
- B9
Dias, P. E. M., Moraes, C., Sousa, J.R., Beaini, T. L. , & Melani, R. F. H. (2013). Escaneamento 3D por fotogrametria e software livre aplicado à Reconstrução Facial Forense. https://doi.org/10.13140/RG.2.2.30491.08489